联系方式
- 联系人: 相先生
- 手机:18805154797
- 地址: 中国 江苏 南京 江宁区 江苏省南京市江宁区科苑路128号9幢
产品列表
-
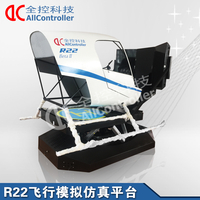
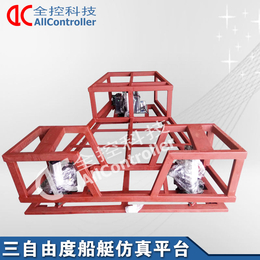 三自由度伺服电动飞行船舶摇摆振动平台128型 ¥60000.0元/台 议价
三自由度伺服电动飞行船舶摇摆振动平台128型 ¥60000.0元/台 议价 -
 9DVR虚拟现实六自由度电动伺服车辆模拟电动平台 ¥188000.0元/台 议价
9DVR虚拟现实六自由度电动伺服车辆模拟电动平台 ¥188000.0元/台 议价 -
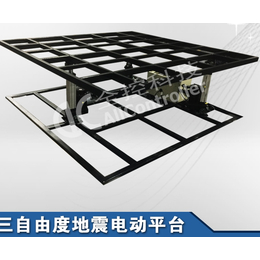
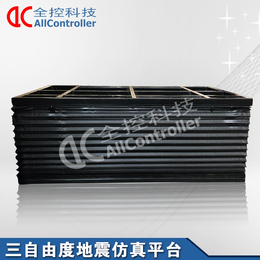 9DVR虚拟现实三自由度电动伺服模拟设备平台 ¥30000.0元/台 议价
9DVR虚拟现实三自由度电动伺服模拟设备平台 ¥30000.0元/台 议价 -
 9DVR虚拟现实三自由度震感电动伺服平台399型 ¥680000.0元/台 议价
9DVR虚拟现实三自由度震感电动伺服平台399型 ¥680000.0元/台 议价 -
 虚拟现实军事平台摇摆台三六多自由度系统模拟试验台科研 ¥70000.0元/台 议价
虚拟现实军事平台摇摆台三六多自由度系统模拟试验台科研 ¥70000.0元/台 议价 -
 三自由度伺服电动驾驶模拟动感摇摆振动电动平台 ¥28000.0元/台 议价
三自由度伺服电动驾驶模拟动感摇摆振动电动平台 ¥28000.0元/台 议价 -
 9DVR影院伺服电动VR游戏体验模拟设备平台振动摇摆 ¥150000.0元/件 议价
9DVR影院伺服电动VR游戏体验模拟设备平台振动摇摆 ¥150000.0元/件 议价 -
 9DVR虚拟现实六自由度电动伺服汽车模拟平台 ¥178000.0元/台 议价
9DVR虚拟现实六自由度电动伺服汽车模拟平台 ¥178000.0元/台 议价
详情
六自由度机器人已证实可用于研发放设治疗模拟肿流运动模型
创建时间:2020-08-19 11:15
浏览次数:97
目的:
在治疗领域,能够跟踪患者运动或沿6自由度(6DOF患者的医疗技术的使用稳步增长。但是,由于跟踪和执行6DOF运动的复杂性,至关重要的是,必须正确验证此类技术以使其在规格范围内运行,以确保患者安全。在这项研究中,提出了一种机器人运动模型,可以对它进行编程,以沿X(左右),Y(上下),Z(前后),俯仰(大约X),横滚(Y左右)和偏航(Z左右))轴。此外,可以执行沿所有轴的高度同步运动,以模拟6D的动态运动。表征了这种6D运动的准确性和可重复性。

方法:
全控科技根据洗出算法以及并行运动学平台原型,构建了内部设计和制造的6D机器人运动幻影。使用反向运动学公式控制该设备,并针对每个自由度同时或分别执行所有6个自由度(X,Y,Z,俯仰,横摇和偏航)的运动。此外,有效地执行了先前记录的6D颅骨和运动。使用15 fps 6D红外标记跟踪系统验证了机器人的幻影运动,并将测得的轨迹与预期的输入轨迹进行了定量比较。还确定了系统的工作空间6D速度,齿隙和重量负载能力。
结果:
所述6DOF平台的评价表明0.14平移根均方误差(RMSE)值,0.22,和0.08毫米超过20毫米的X和ÿ和10毫米Ž分别和0.16旋转RMSE值°,0.06°,和在俯仰,横摇和偏航的10°上分别为0.08°。机器人平台还有效地执行了受控的6D运动,并在15分钟内再现了颅骨轨迹,平移和旋转RMSE为0.04 mm,旋转时的RMSE为2分钟,平移时RMSE为0.06 mm旋转0.04°。
结论:
在临床标准下,这种6D机器人模型已被证明是准确的,并且能够以6D模式再现运动。这种功能使机器人模型可用于质量保证或研究目的。(本文由南京全控提供,转载请说明出处!)
免责声明:本文所有内容并不反映任何第一枪网意见及观点,亦不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议,第一枪网概不负责,亦不负任何法律责任。请读者仅作参考,并请自行核实相关内容。如有问题请联系media@d17.cc